最近,利用基于定向共振手征光散射的等離子體納米馬達,光驅動的微型馬達已經被證實。這些納米馬達可以單獨尋址,而不需要跟蹤聚焦的激光,從而實現卓越的2D機動性,這使得微型馬達成為水性環境中的多功能機器人平臺。
在這里,維爾茨堡大學Bert Hecht將一個光控操縱器,一個等離子體納米鑷子,整合到微型平臺中,通過實現溶液中懸浮的單個納米粒子的精確、全光學傳輸和輸送,使其成為一個微型機器人。
文章要點
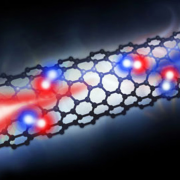
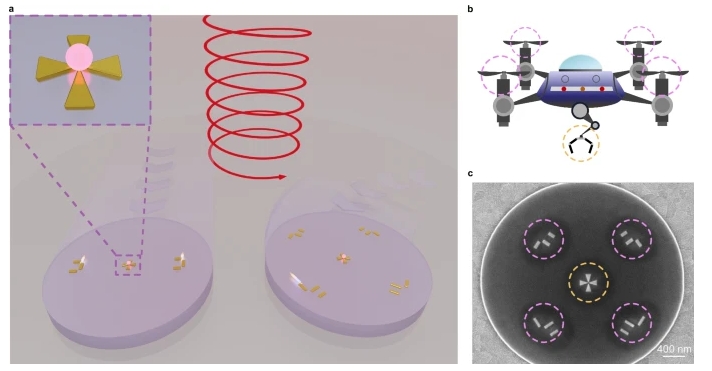
1)等離子體納米鑷子由共振交叉天線納米結構組成,表現出中心近場熱點,擴展了基于聚焦激光束的傳統光鑷捕獲納米粒子的能力。然而,大多數等離子體納米鑷子固定在基底上,缺乏移動性。
2)等離子體微機器人利用圓偏振光來控制兩個電機,并在交叉天線中心穩定捕獲70納米熒光納米金剛石。微型機器人操作的復雜序列,包括捕獲-運輸-釋放-陷阱運輸動作,展示了微型機器人在拾取和釋放納米粒子方面的多功能性和精確性。
微型機器人設計為推進納米技術和生命科學開辟了潛在的途徑,應用于靶向藥物輸送、單細胞操縱,并通過提供先進的量子傳感平臺,促進納米尺度的跨學科研究。
參考文獻
Qin, J., Wu, X., Krueger, A. et al. Light-driven plasmonic microrobot for nanoparticle manipulation. Nat Commun 16, 2570 (2025).
DOI:10.1038/s41467-025-57871-x
https://doi.org/10.1038/s41467-025-57871-x