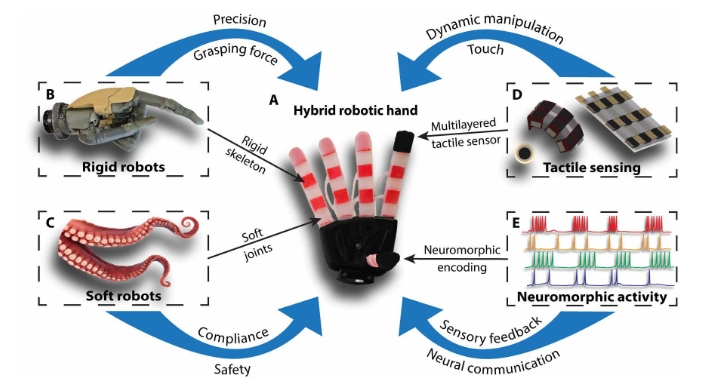
人手的混合結(jié)構(gòu)結(jié)合了柔軟和堅(jiān)硬的解剖結(jié)構(gòu),為多用途的物體抓取提供了力量和適應(yīng)性。皮膚機(jī)械感受器的觸覺(jué)能夠?qū)崿F(xiàn)精確和動(dòng)態(tài)的操作。復(fù)制人手的嘗試還沒(méi)有達(dá)到一個(gè)真正的具有觸覺(jué)感知的仿生混合機(jī)器人手。
近日,約翰霍普金斯大學(xué)Sriramana Sankar介紹了一種自然假手,由柔軟的機(jī)器人關(guān)節(jié)和剛性的內(nèi)骨骼組成,內(nèi)骨骼具有三個(gè)獨(dú)立的神經(jīng)形態(tài)觸覺(jué)傳感層,靈感來(lái)自人類(lèi)生理學(xué)。
文章要點(diǎn)
1)該創(chuàng)新設(shè)計(jì)利用了軟機(jī)器人和硬機(jī)器人的優(yōu)勢(shì),使混合機(jī)器人手能夠靈活地抓取各種表面紋理、重量和合規(guī)性的大量日常物體,同時(shí)以99.69%的平均分類(lèi)精度區(qū)分它們。
2)具有多層觸覺(jué)傳感的混合機(jī)器人手在紋理辨別任務(wù)中實(shí)現(xiàn)了98.38%的平均分類(lèi)準(zhǔn)確率,超過(guò)了柔軟的機(jī)器人手指和剛性的假肢手指。通過(guò)肌電圖控制,這種改造型假手允許上肢缺失的個(gè)人通過(guò)精確的表面紋理檢測(cè)來(lái)抓住順從的物體。
參考文獻(xiàn)
Sriramana Sankar, et al, A natural biomimetic prosthetic hand with neuromorphic tactile sensing for precise and compliant grasping, Sci. Adv. 11, eadr9300 (2025)
DOI: 10.1126/sciadv.adr9300