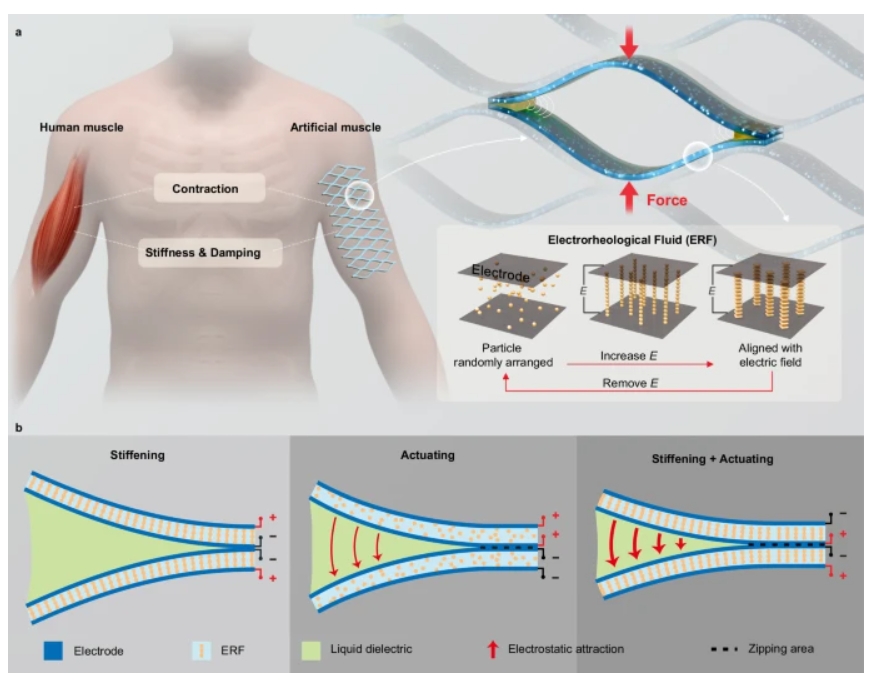
受生物肌肉適應性的啟發,機器人人工肌肉由于其靈活性而在動態環境中優于剛性機器人。然而,柔性驅動器的固有順應性限制了力傳輸能力和動態響應。生物肌肉調節其剛度和阻尼,改變粘彈性特性和與環境相互作用的力。
在這里,倫敦帝國理工學院Majid Taghavi將這種功能復制到電加強帶狀驅動器中,一種能夠進行高收縮和剛度調節的單片式強致動器。
文章要點
1)這種無縫集成實現了收縮力調節,將其作為輕質可變電阻被動彈簧的能力擴展了2.5倍以上,并改善了其動態響應,具有更快的收縮和超過50%的振蕩快速衰減。
2)研究人員展示了電加強帶狀致動器在主動,被動和雙重連接功能中的多功能性,包括手臂彎曲可穿戴機器人,機械臂具有可變的抗沖擊性和類似肌肉的剛度和阻尼調節。
參考文獻
Xu, Y., Wen, J., Burdet, E. et al. Monolithic electrostatic actuators with independent stiffness modulation. Nat Commun 16, 1174 (2025).
DOI:10.1038/s41467-025-56455-z
https://doi.org/10.1038/s41467-025-56455-z